+86 18663958101
+86 18663958101


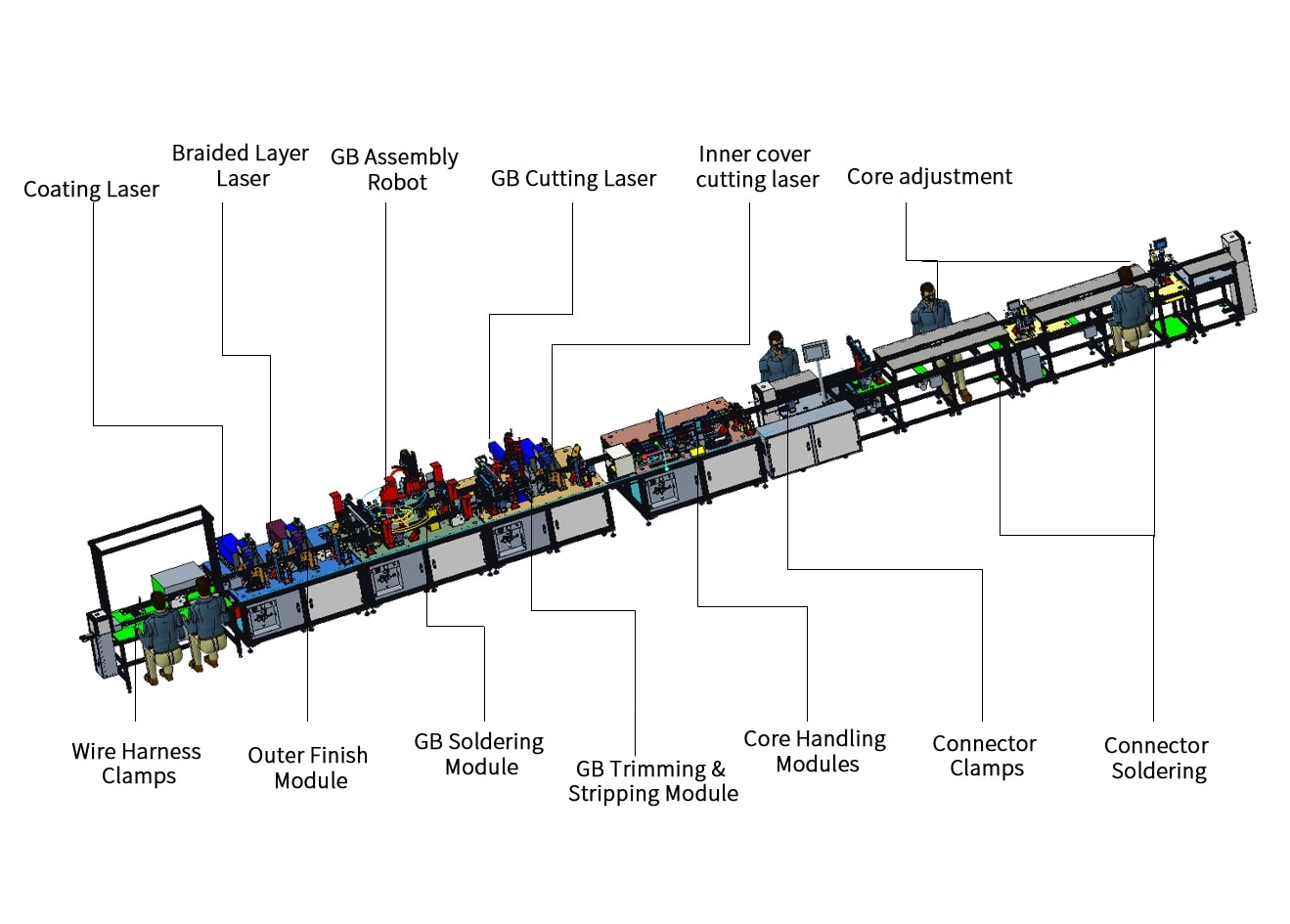
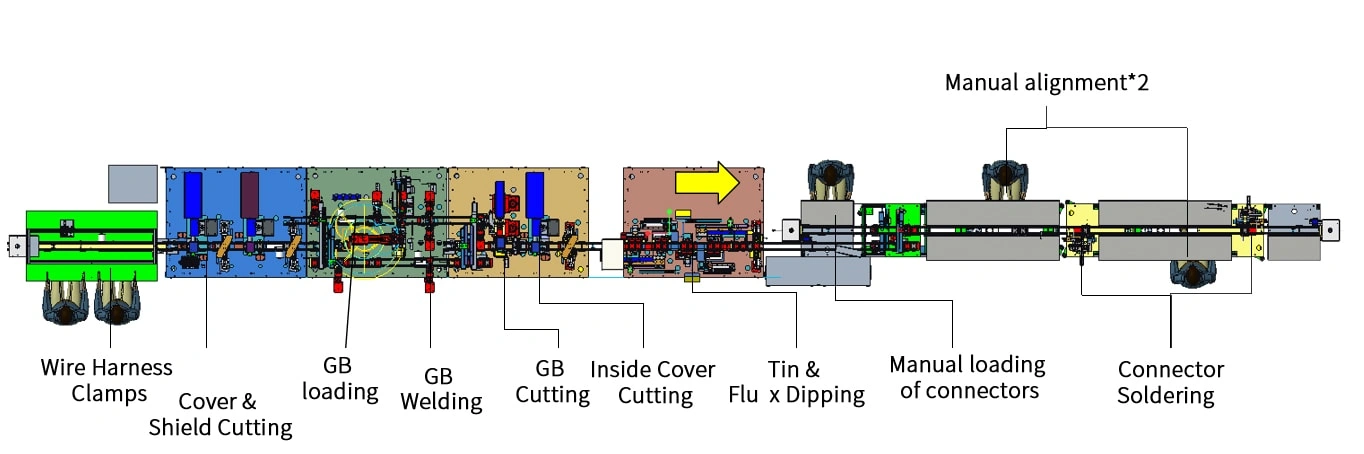
◆Workflow:
1、Four-axis robot is responsible for GB loading on the upper and lower sides;
2、Laser cutting is used for outer cover, shield and inner cover;
3、After GB welding, visual positioning, laser cutting GB;
4、Left and right connectors are loaded manually;
5、before connector welding, manual adjustment of visual alignment, core wire alignment and automatic welding;
6、Wire body covers an area of 1.4mX16m.



Copyright © 2026 by Qingdao Raylaser Technology Co., Ltd. All Rights Reserved Privacy Policy
Design by HUISHANGMEDIA*REQUIRED FIELDS